修改setup.py编译测试¶
from setuptools import setup
from glob import glob
import os
package_name = 'fishbot_description'
setup(
name=package_name,
version='0.0.0',
packages=[package_name],
data_files=[
('share/ament_index/resource_index/packages',
['resource/' + package_name]),
('share/' + package_name, ['package.xml']),
(os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py')),
(os.path.join('share', package_name, 'urdf'), glob('urdf/**')),
],
install_requires=['setuptools'],
zip_safe=True,
maintainer='root',
maintainer_email='root@todo.todo',
description='TODO: Package description',
license='TODO: License declaration',
tests_require=['pytest'],
entry_points={
'console_scripts': [
],
},
)
编译测试
colcon build
source install/setup.bash
ros2 launch fishbot_description display_rviz2.launch.py
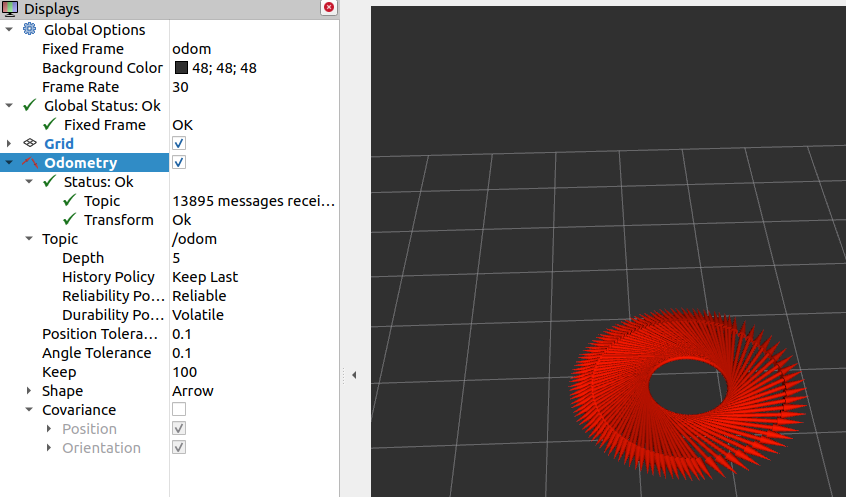
添加robotmodel模块,分别选择link名称如下,即可看到机器人的模型显示

此时看看节点关系图
打开rqt,在 rqt 工具的菜单栏中,选择Plugins(插件)> Introspection(内省)> Node Graph

然后打开TF模块,看一下机器人的坐标系关系